

 | ||||||||||||||||||||||||
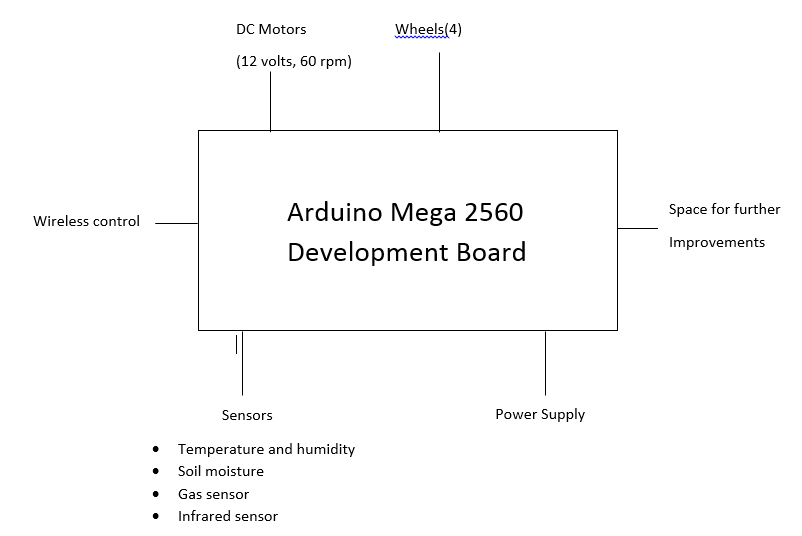
| Block Diagram
ARDUINO
Arduino
is an open-source computer hardware and software company, project and
user community that designs and manufactures kits for building digital devices
and interactive objects that can sense and control the physical world.
Arduino started in 2005 as a project for students at the Interaction
Design Institute Ivrea
in Ivrea, Italy. At that time program students used a "BASIC Stamp" at a cost of $100, considered expensive for
students. Massimo Banzi, one of the founders, taught at Ivrea. The name
"Arduino" comes from a bar in Ivrea, where some of the founders of
the project used to meet.
This project uses Arduino MEGA 2560 development board.

The Arduino Mega
2560 is a microcontroller board based on the ATmega2560. It has 54 digital
input/output pins (of which 15 can be used as PWM outputs), 16 analog inputs, 4
UARTs (hardware serial ports), a 16 MHz crystal oscillator, a USB connection, a
power jack, an ICSP header, and a reset button. It contains everything needed
to support the microcontroller; simply connect it to a computer with a USB
cable or power it with a AC-to-DC adapter or battery to get started.
SPECIFICATIONS AND PIN CONFIGURATION
The board can operate on an external
supply of 6 to 20 volts. If supplied with less than 7V, however, the 5V pin may
supply less than five volts and the board may be unstable. If using more than
12V, the voltage regulator may overheat and damage the board. The recommended
range is 7 to 12 volts.
The power pins are as follows:
Each of the 54 digital pins on
the Mega can be used as an input or output, using pinMode(), digitalWrite(), and digitalRead() functions. They operate at 5 volts. Each pin can
provide or receive a maximum of 40 mA and has an internal pull-up resistor
(disconnected by default) of 20-50 kOhms. In addition, some pins have
specialized functions:
The Mega2560 has 16 analog
inputs, each of which provide 10 bits of resolution (i.e. 1024 different
values). By default they measure from ground to 5 volts, though is it possible
to change the upper end of their range using the AREF pin and analogReference()
function.
There are a couple of other pins
on the board:
Programming
The Arduino Mega can be
programmed with the Arduino software.
The ATmega2560
on the Arduino Mega comes preburned with a bootloader that allows you
to upload new code to it without the use of an external hardware programmer. It
communicates using the original STK500 protocol.
The Arduino integrated development environment
(IDE) is a cross-platform application written in Java, and derives from the IDE for the Processing programming language
and the Wiring projects. It is designed to
introduce programming to artists and other newcomers unfamiliar with software
development. It includes a code editor with features such as syntax highlighting, brace
matching, and automatic indentation, and is also capable of compiling and
uploading programs to the board with a single click. A program or code written
for Arduino is called a sketch.
Arduino programs are written in C or C++. The Arduino
IDE comes with a software library called "Wiring" from the original Wiring
project, which makes many common input/output operations much easier. Users
only need define two functions to make a runnable cyclic
executive program:
SENSORS :
SOIL
MOISTURE SENSOR :

Soil
moisture sensors measure the water content in soil.
A soil moisture probe is made up of multiple soil moisture sensors. Since
analytical measurement of free soil moisture requires removing a sample and
drying it to extract moisture, soil moisture sensors measure some other
property, such as electrical resistance, dielectric constant, or interaction
with neutrons, as a proxy for moisture content. The relation between the
measured property and soil moisture must be calibrated and may vary depending
on soil type.
Specifications
TEMPERATURE
AND HUMIDITY SENSOR :

The
DHT11 is a basic, ultra low-cost digital temperature and humidity sensor. It
uses a capacitive humidity sensor and a thermistor to measure the surrounding
air, and spits out a digital signal on the data pin. Its fairly simple to use,
but requires careful timing to grab data. The only real downside of this sensor
is you can only get new data from it once every 2 seconds, so when using
library, sensor readings can be up to 2 seconds old.
SPECIFICATIONS

The
IR Sensor-Single is a general purpose proximity sensor. Usually it is used for
collision detection or obstacle detection. The module consist of an IR emitter
and IR receiver pair. The high precision IR receiver always detects IR signal.
The module consists of 358 comparator IC. The output of sensor is high whenever
the IR receiver receives a signal of IR frequency and low otherwise. The
on-board LED indicator helps user to check status of the sensor without using
any additional hardware. The power consumption of this module is low. It gives
a digital output.
Features
GAS SENSOR :
MQ
2 Gas sensor
The Grove - Gas
Sensor(MQ2) module is useful for gas leakage detecting. It can detect LPG,
i-butane, methane, alcohol, Hydrogen, smoke and so on.
MQ
6 Gas Sensor
Sensitive
material of MQ-6 gas sensor is SnO2, which with lower conductivity in clean
air. When the target flammable gas exist, the sensor’s conductivity gets higher
along with the gas concentration rising. MQ-6 gas sensor can detect kinds of
flammable gases, especially has high sensitivity to LPG (propane). It is a kind
of low-cost sensor for many applications.
WINDMILL :

A
wind turbine is a device that converts kinetic energy from the wind into
electrical power. The speed of wind on planets like Mars and Jovian gas giant
planets (Jupiter, Saturn, Uranus, and Neptune) is high enough to produce energy
needed by the rover.
The
speed of wind on Mars ranges from 10 mps to 30 mps or 20 miles/h to 60 miles/h.
Currently, the windmill employed on Earth produces 70% of energy at 12 mph and
the power produced by a windmill is 250 W to 1.8 MW. On Jovian planets like
Neptune the speed of wind is 1,100 kph to 2,100 kph. The rover needs 140 W of
energy to operate. So, windmill employed on rover can complete its power
requirements.
To
prevent damage, the windmill stops functioning when the speed of the wind
exceeds 25 mph. Rover can be installed with small windmill which can generate
energy. As, the speed of the wind is more than 25 mph, so, the wings of the
windmill must be strong enough to tolerate the pressure of the high speed wind.
So, small changes made in the windmill can be helpful in installing it on
rovers and can act as a good alternate source of energy for rovers.
RESULT
ANALYSIS AND DISCUSSION
This project
deals with the analysis of results of various sensors. Results of sensors like
Temperature, air, Soil moisture etc. are studied and examined. With the means
of graph the change in values of these
sensors can be studied very accurately. This project helps to deal with the
understanding of those places where it is difficult to analyse the physical and
environmental conditions.
Use of Arduino to program sensors and the
display of graphs have helped a lot in better understanding of project. Until
now the design of this rover is not completely perfect, to make the rover more
useful a lot of changes needed to be done in future so that it can display a wide
variety of data and may help to understand the physical and environmental conditions more clearly and accurately.

CONCLUSION :
This model is designed keeping in view the shortcomings of the models
sent in space. The changes are needed to be made in power supply, balancing and
employment of sensors to search for extraterrestrial life form.
A robotic
spacecraft is a spacecraft with no humans on board, usually under telerobotic
control. A robotic spacecraft designed to make scientific research measurements
is often called a space probe. Many space missions are more suited to
telerobotic rather than crewed operation, due to lower cost and lower risk
factors. In addition, some planetary destinations such as Venus or the vicinity
of Jupiter are too hostile for human survival, given current technology. Outer
planets such as Saturn, Uranus, and Neptune are too distant to reach with
current crewed spaceflight technology, so telerobotic probes are the only way
to explore them.
The increasing
use of automation in future space systems is a fundamental component of future
space exploration which will resemble remotely distributed, net-worked
operations. As such, the design of both manned and unmanned future space
systems has significant HSC (Human Supervisory Control) implications. However,
only a handful of projects have recognized the importance of HSC for future
space systems. In addition to those described previously, Cummings described a
preliminary design for the systems status display of a future lunar landing
vehicle which would have considerably reduced reliance on Mission Control
without compromising the probability of mission success by layering and
grouping information in categories that could be easily and intuitively browsed
on reconfigurable screens. Similar upgrades were planned for the Space Shuttle
cockpit as part of the aforementioned Cockpit Avionics Upgrade. Unfortunately,
these projects were cancelled before they could be implemented in operational
spacecraft. Although technology has progressed rapidly during the last 50 years
of the Space Age, the issues surrounding collaboration between humans and
automation are as relevant today as during the Apollo era, yet space human
supervisory control research has not kept pace with technological advancements.
Significant investment is therefore required not only to develop methodologies
for optimizing human–automation system integration, in order to maximize
mission safety and success at reasonable cost, but also to ensure that the
resulting human centred design
recommendations and requirements are implemented in operational spacecraft,
both manned and unmanned. A strong HSC research and development program will
thus be crucial to achieving the Vision for Space Exploration, especially given
the limited resources under which it must be accomplished.
This project is
designed in a very economical way and unnecessary costing is avoided so that
more attention can be paid to other areas for the improvement of rovers.
FUTURE
SCOPE OF PROJECT
Space Probe are
sent to hostile places where humans cannot reach or survive so the future scope of this project includes the
addition of such sensors which can make it capable to detect hazards, sense the
environment and makes use of AI protocols.
This model is
capable of detecting Temperature and Humidity, Soil Moisture, Gases in
atmosphere. So, it can be used in fields to detect moisture in the soil. It can
be used in cities to detect amount of Carbon present and Smoke hence, it can
detect pollution in the atmosphere. The use of IR sensor enables us to sense
the obstacles present and their distance from such obstacles. Temperature and
Humidity sensor can sense the Temperature and humidity of a place.
Although this
probe has many advantages but future improvements includes the addition of
Camera, More sensors, Radio communication, etc.
More efficient
power supply can be used like radioactive hydrogen cell or chemical fuel cell.
Rover can be
designed in such a way so that it can be capable to bring back samples from
such unfavourable places where humans cannot reach till now.
|


